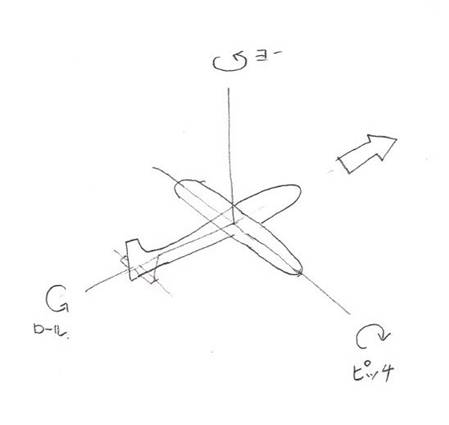
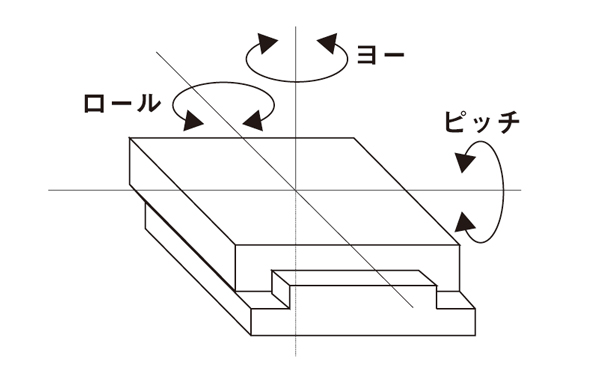
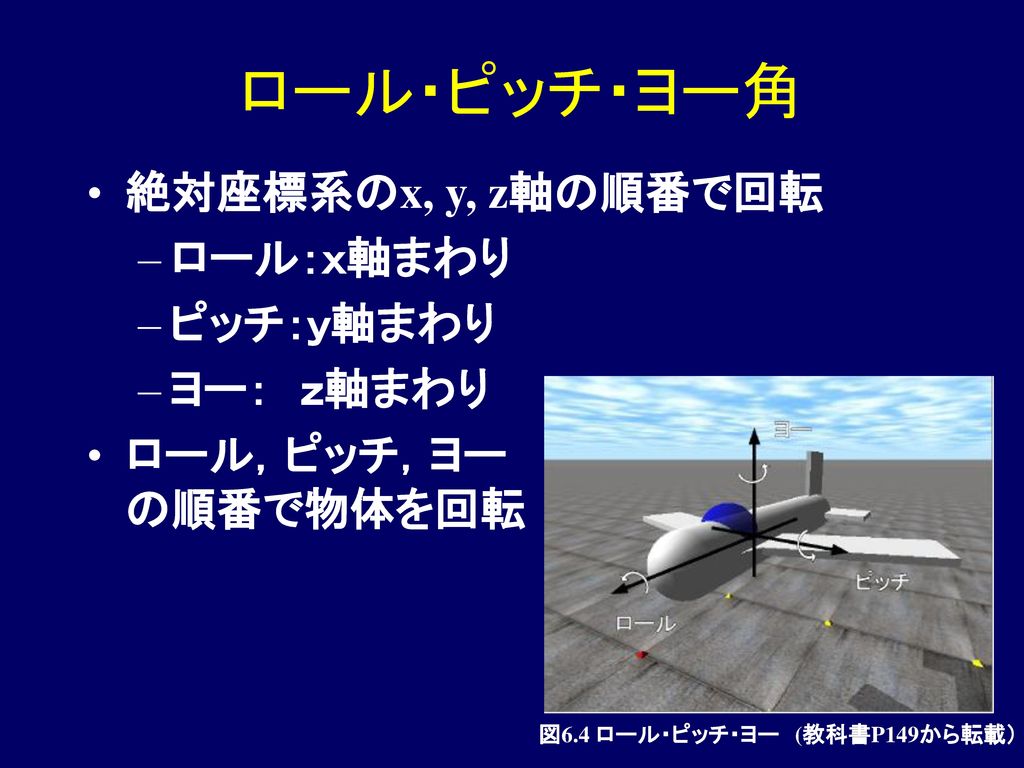
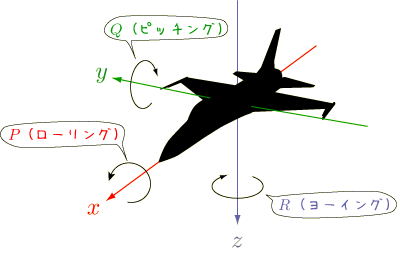
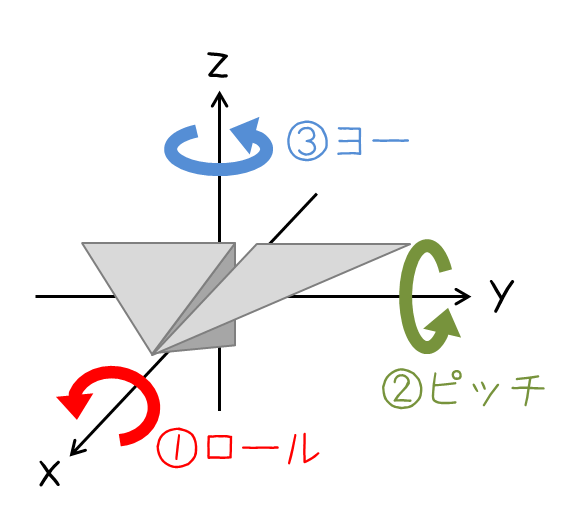
ピッチ ロール ヨー 図

顔検出と顔属性の概念 Azure Cognitive Services Microsoft Docs
Https Annex Jsap Or Jp Photonics Kogaku Public 30 05 Kaisetsu1 Pdf
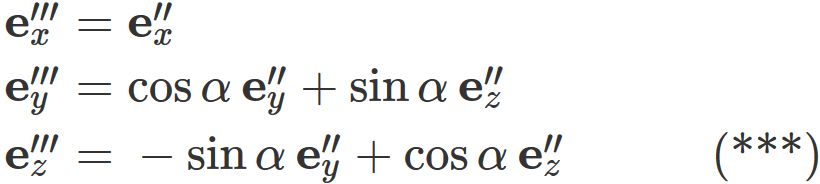
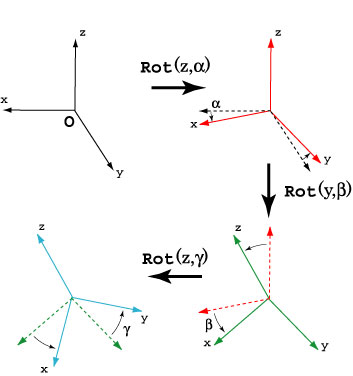
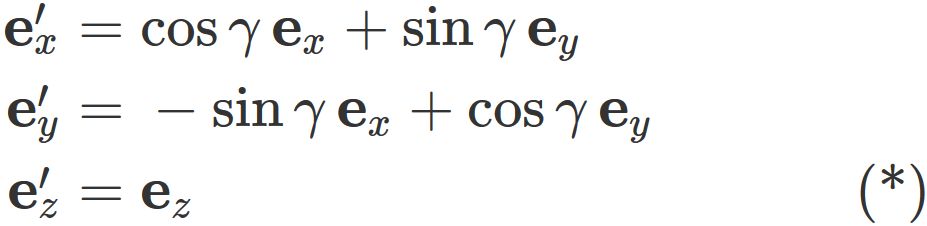
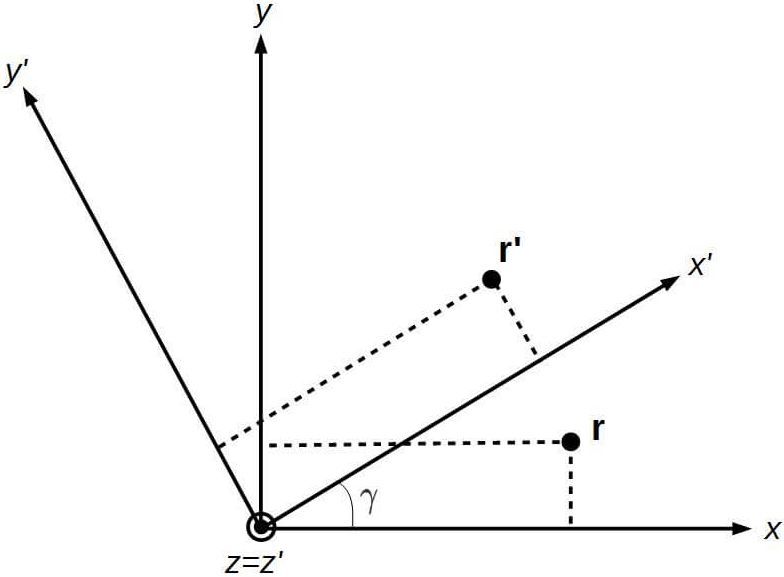
座標変換
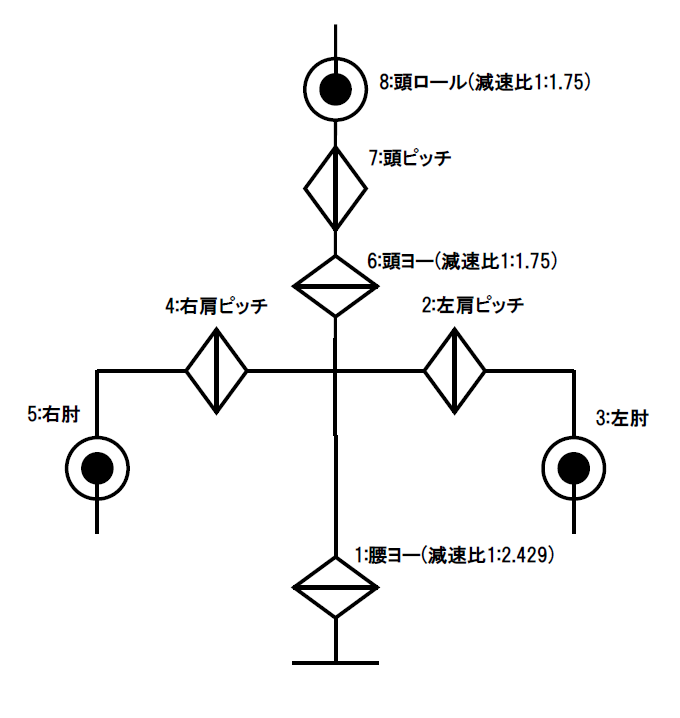
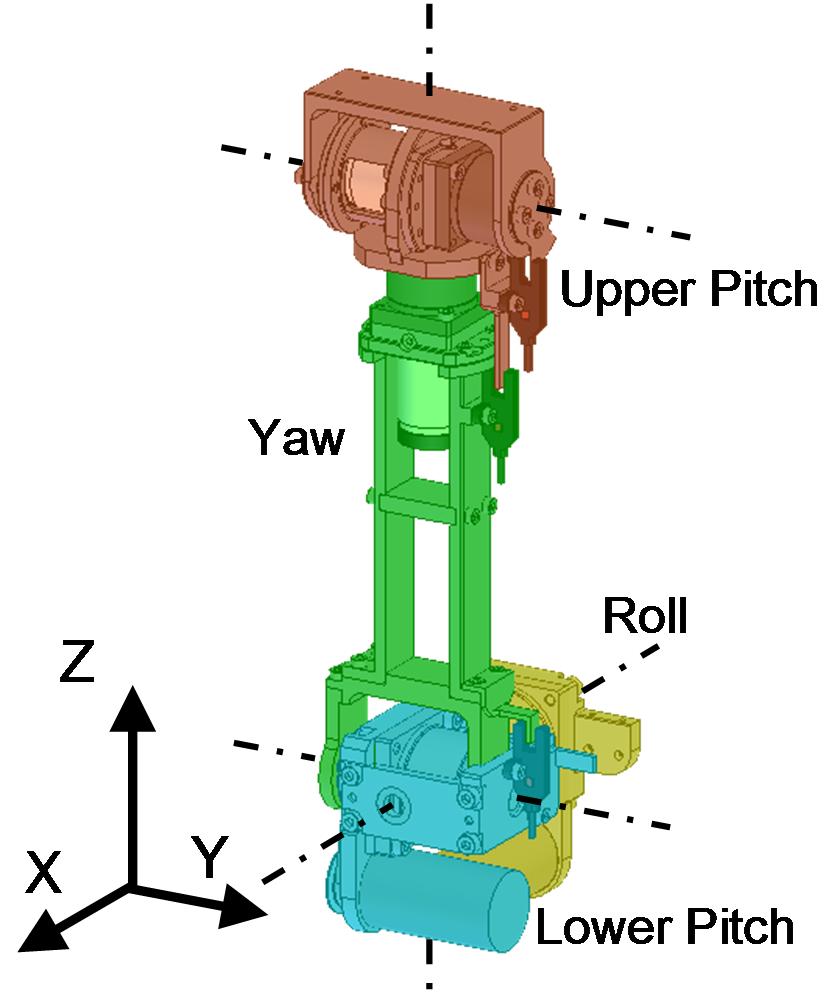
軸配置図 Sota取扱説明書
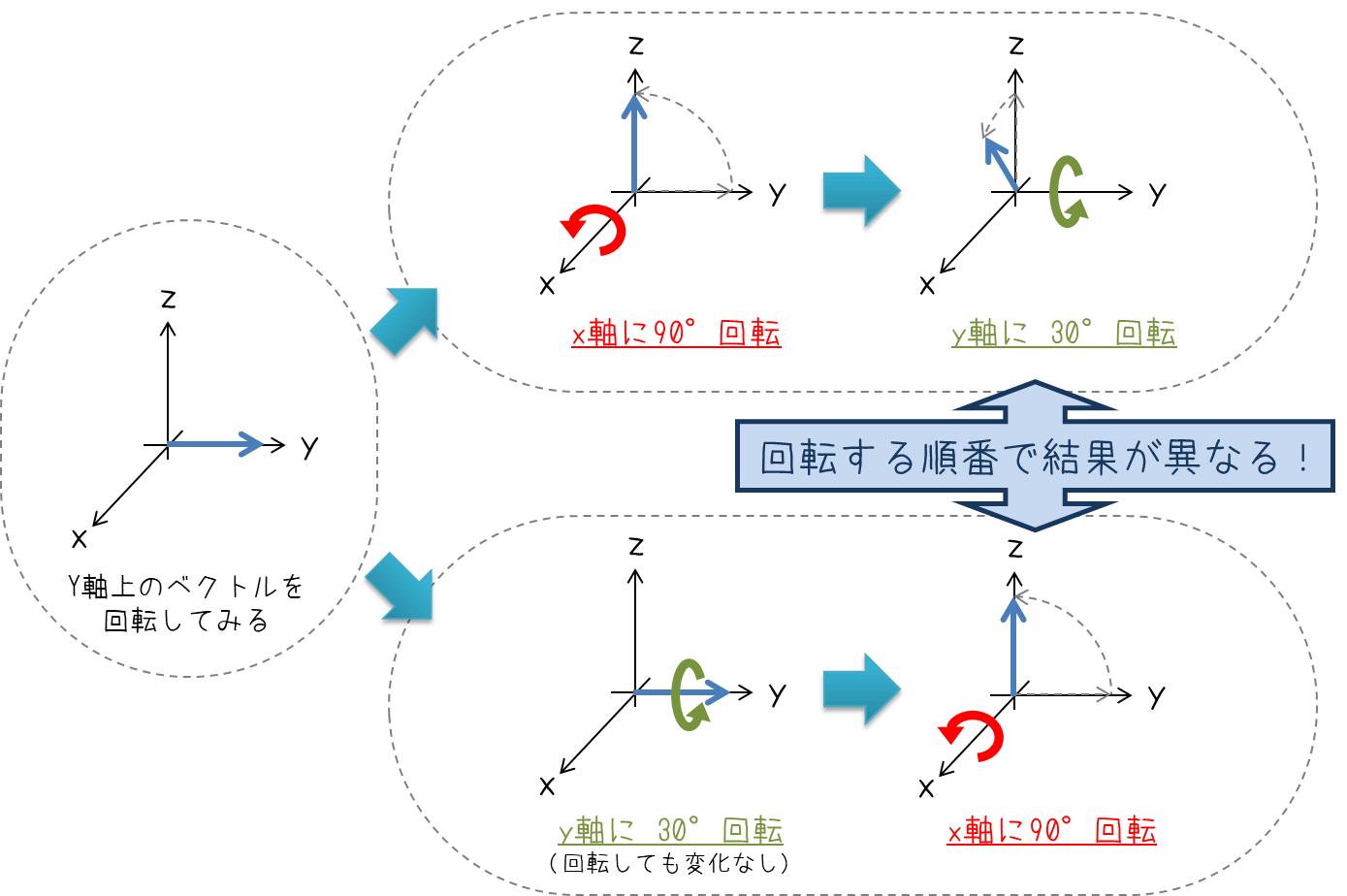
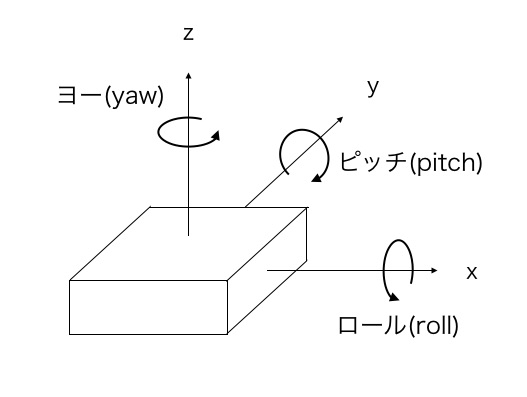
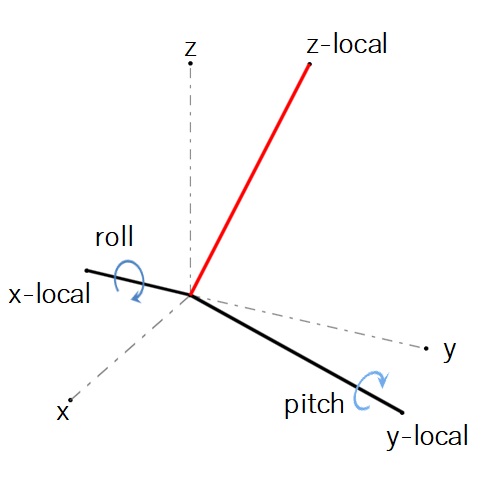
3次元ベクトルの回転 ロール ピッチ ヨー Watako Lab
座標変換


C 加速度センサからの対地角 Yaw Roll Pitchの求め方 Teratail

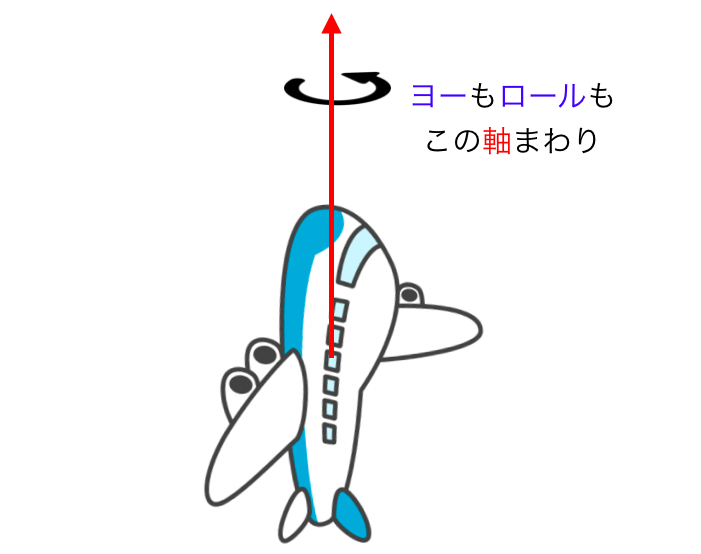
飛行機の3軸と動き ピッチ ロール ヨーについて 飛行機パイロット

6軸センサの状態方程式 制御趣味

1994 072391号 三次元航行体の操舵制御装置 Astamuse
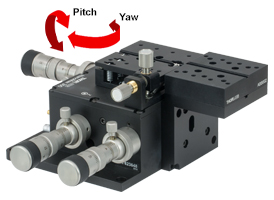
フレクシャーステージ用アクセサリ あおり調整 移動用
ロールピッチヨー角による回転行列の表現 理数アラカルト

回転ベクトル 回転行列 クォータニオン オイラー角についてまとめてみた かみのメモ

Unity C 床面 Yaw Yz平面 Pitch に射影された角度を 符号 方向 付きで求める 3d ヽ ゝ Fantom の 開発blog
6 6節 運動幾何

1995 080788号 多関節ロボットのコンプライアンス制御方法 Astamuse

ドローン操縦の練習方法 基本トレーニング9種とシミュレーター活用

2017 136664号 脚式移動ロボット Astamuse

Toon Inclinoscope サポート トオン Toon Llc

移動ノードのmakerotatorとbreakrotatorの使い道 Ue4 Answerhub

ロールピッチヨー角による回転行列の表現 理数アラカルト
Mtb Trekking

3次元計測における物体の姿勢と角度 アキュイティー株式会社 Acuity Inc
Http Www Edu Tuis Ac Jp Suzuki Paper Dronepilot Pp132 135 Pdf
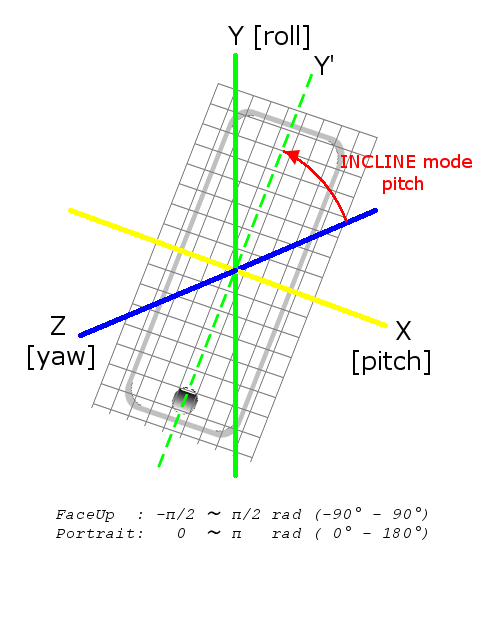
Toon Inclinoscope サポート トオン Toon Llc
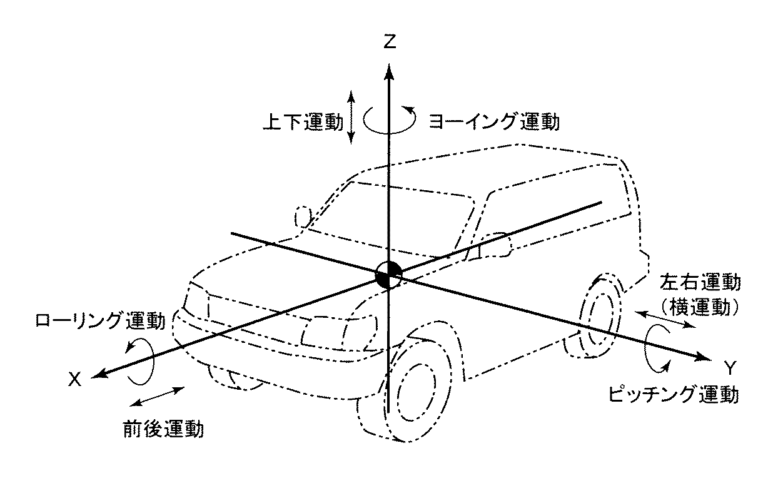
ローリング ピッチング ヨーイングとは 車の基本的な挙動を解説 Moby モビー
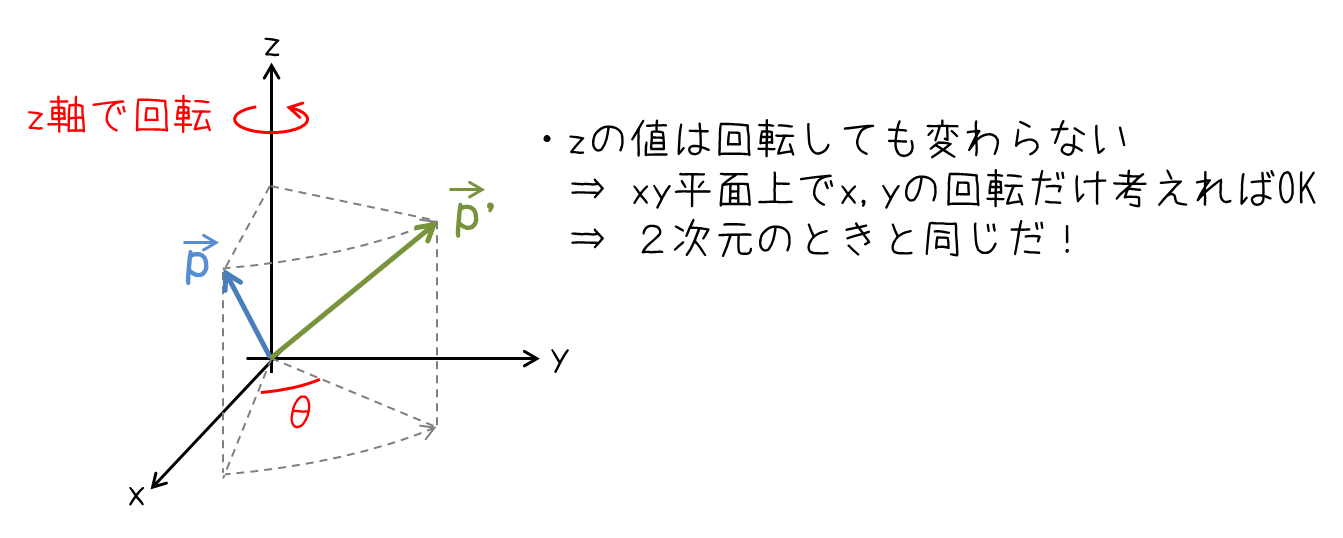
3次元ベクトルの回転 ロール ピッチ ヨー Watako Lab
クォータニオン Quaternion を総整理 三次元物体の回転と姿勢を鮮やかに扱う Qiita

フレクシャーステージ用アクセサリ あおり調整 移動用

1994 161556号 オートパイロット装置 Astamuse
Opengl勉強会用 資料のページ
とある無職の悪戦記録 加速度 角速度

息子と一緒に Makers

2011 08 22
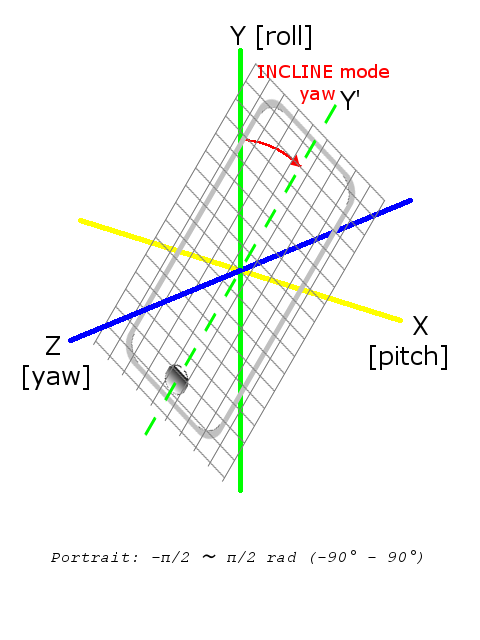
Toon Inclinoscope サポート トオン Toon Llc

姿勢 を計測すればバイクはより安全に走れる Ekuipp エクイップ Magazine

2006 514258号 加速度計およびgps受信機を用いた発射体の誘導 Astamuse

ロール ピッチ ヨー軸回りの座標変換行列 理系tips

Imems を採用した角速度検知用のジャイロスコープ アナログ デバイセズ

昼夜逆転 工作室 6軸センサーmpu 6050動作テスト

C 加速度センサからの対地角 Yaw Roll Pitchの求め方 Teratail
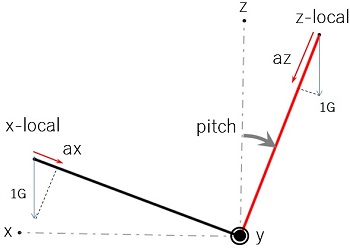
加速度センサーから軸廻り角度への変換計算 自作のいろいろ
2

2005 007491号 脚式歩行ロボットの運動制御装置及び運動制御方法 Astamuse

Opengl勉強会用 資料のページ

Ardupilot のap Mathクラスにある関数 Qiita

図1 2 16 飛行機の運動の軸

6軸センサの状態方程式 制御趣味
2013 067368号 ピッチ軸を支持するエンジンマウンティング構造 Astamuse
Head Robot Team
超初心者のためのr Cカー入門ガイド
6 6節 運動幾何
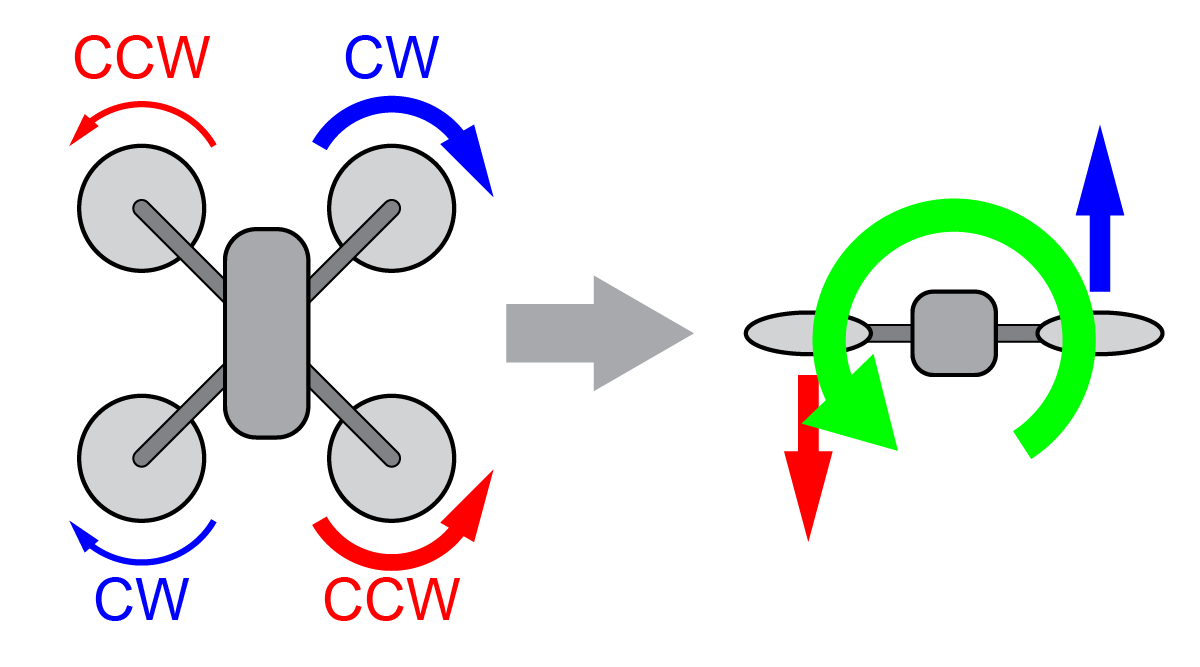
ドローン制御の基礎を学ぼう ローターと推進力 回転の関係 Tajima Robotics

1994 156399号 姿勢制御システム 及び人工衛星の方向を制御する方法 Astamuse

ロボットの3軸 ピッチ軸 ロール軸 ヨー軸 ロボザック組み立て記
6 6節 運動幾何
Faq 手動ステージ 用語 定義 精度 単位など 駿河精機株式会社

M5stickcの6軸imu Mpu6886を調べる Lang Ship
Whole Body Emotional Expression Robot

2005 288561号 ヒューマノイドロボット Astamuse
パソコン上のm5stackの3dモデルを M5stackの動きに合わせて動かす Ambientでiotをはじめよう

スノーボードと身長の関係 カービングではなぜ高身長のほうが大きなたわみを生み出せる スノボ学

リーンとロール軸 2 聖地巡礼 バイクライディングin北海道
加速度センサーから軸廻り角度への変換計算 自作のいろいろ
Https Tech Jsae Or Jp Hanbai Html Errata Errata Z208 15 Pdf
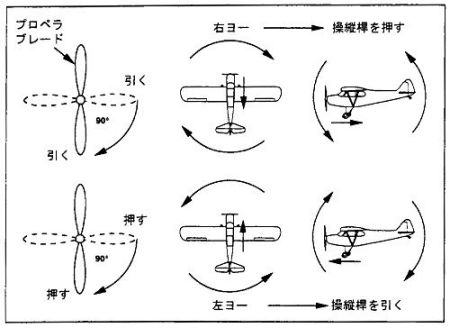
日本財団図書館 電子図書館 エアロンカ 2001年10月

遠隔制御機器の駆動制御装置
ロボットシミュレーション Ode Dynamics Engineによるロボットプログラミング Ppt Download
Https Tech Jsae Or Jp Hanbai Html Errata Errata Z208 15 Pdf

Orizuruの裏話 3回目 Orizuruの姿勢制御 Lazurite

今さら聞けない クルマの ロール ピッチ ヨー って何 自動車情報 ニュース Web Cartop

Cleared For Takeoff
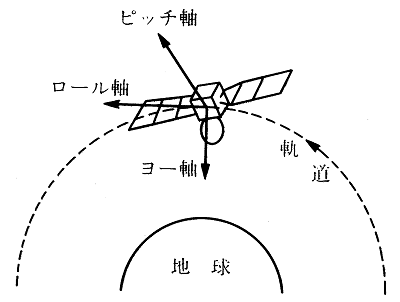
電気専門用語集 Web版 用語集no 18 用語番号 4 3 4 用語 三軸安定法 読み さんじくあんていほう 英語 Three Axis Stabilization 定義 衛星などの姿勢安定法で 衛星の

Mag Acc Gyroデータからピッチ ヨー ロールを計算する

空の産業革命 ドローン 業務活用とiot的価値 Tech Note テックノート ドローン 春原 図
Https Annex Jsap Or Jp Photonics Kogaku Public 30 05 Kaisetsu1 Pdf

1996 164898号 姿勢制御装置 Astamuse

2015 007757号 レンズ鏡筒及び撮像装置 Astamuse

ラダー エルロン ドローンの舵の名称を図解 覚え方付きで解説 関西ドローン 公式ブログ

2000 142596号 人工衛星の姿勢制御方法及びその装置 Astamuse

近代電子制御システムの根幹 Imu って何だ 2017 最新技術の基礎知識 Webオートバイ

C 加速度センサからの対地角 Yaw Roll Pitchの求め方 Teratail
Toon Inclinoscope サポート トオン Toon Llc
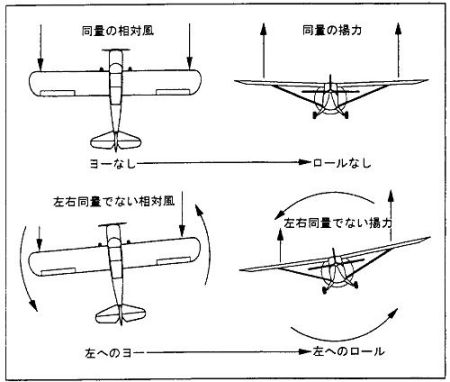
日本財団図書館 電子図書館 エアロンカ 2001年10月

ロールピッチヨー角による回転行列の表現 理数アラカルト

2016 052710号 ロボット Astamuse

どんな形の飛行機でも飛ぶんです その2 飛行中年
ロールピッチヨー角による回転行列の表現 理数アラカルト

東北大学航空部 新歓2020 On Twitter グライダーについて 操縦の仕組みは飛行機とほぼ同様で エレベータ エルロン ラダーの三つの舵を用いて操縦します 三つの舵は

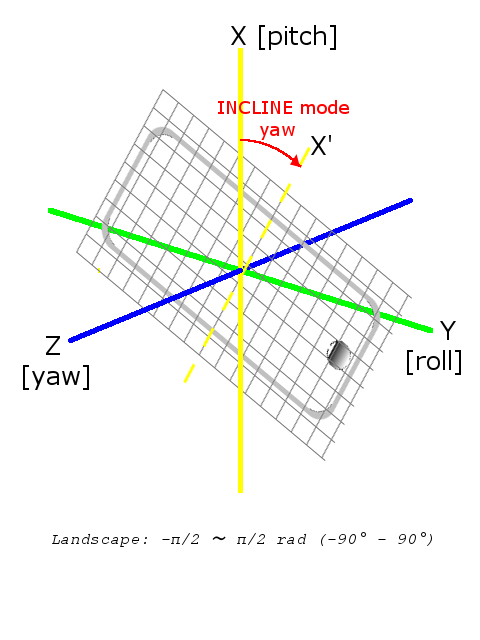
センサー Uwp Applications Microsoft Docs
公開制作 回転行列 物理のかぎプロジェクトwiki
ロールピッチヨー角による回転行列の表現 理数アラカルト
3次元ベクトルの回転 ロール ピッチ ヨー Watako Lab
Https Tech Jsae Or Jp Hanbai Html Errata Errata Z208 15 Pdf

2001 508729号 傾斜軌道に対する宇宙船の改良されたヨー方向付け Astamuse
座標変換

ドローン操縦の練習方法 基本トレーニング9種とシミュレーター活用
とある無職の悪戦記録 加速度 角速度
ピッチ ヨー ロール 回転角の正方向について右手系で 軸に関して 点を Yahoo 知恵袋

東北大学航空部 新歓2020 On Twitter グライダーについて 操縦の仕組みは飛行機とほぼ同様で エレベータ エルロン ラダーの三つの舵を用いて操縦します 三つの舵は



